




ულტრა მაღალი სიზუსტის MZM მოდულატორი, მიკერძოების კონტროლერი, ავტომატური მიკერძოების კონტროლერი


ფუნქცია
• გადახრის ძაბვის კონტროლი პიკზე/ნულზე/Q+/Q−-ზე
• ძაბვის კონტროლი ნებისმიერ წერტილზე
• ულტრა ზუსტი კონტროლი: 50dB მაქსიმალური ჩაქრობის კოეფიციენტი Null რეჟიმში;
±0.5◦ სიზუსტე Q+ და Q− რეჟიმებზე
• დაბალი რხევის ამპლიტუდა:
0.1% Vπ NULL რეჟიმში და PEAK რეჟიმში
2% Vπ Q+ და Q− რეჟიმში
• მაღალი სტაბილურობა: სრულად ციფრული დანერგვით
• დაბალი პროფილი: 40 მმ (სიგანე) × 30 მმ (სიღრმე) × 10 მმ (სიმაღლე)
• მარტივი გამოყენება: ხელით მართვა მინი ჯუმპერით;
მოქნილი OEM ოპერაციები MCU UART2-ის მეშვეობით
• ორი განსხვავებული რეჟიმი გადახრის ძაბვის უზრუნველსაყოფად: ა. ავტომატური გადახრის კონტროლი
ბ. მომხმარებლის მიერ განსაზღვრული გადახრის ძაბვა

აპლიკაცია
• LiNbO3 და სხვა MZ მოდულატორები
• ციფრული NRZ, RZ
• პულსური აპლიკაციები
• ბრილუენის გაფანტვის სისტემა და სხვა ოპტიკური სენსორები
• CATV გადამცემი
შესრულება
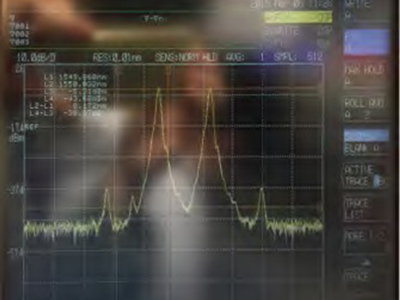
სურათი 1. გადამტანების სუპრესია
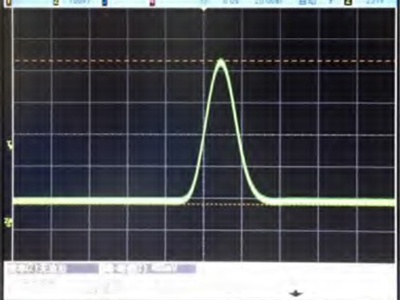
სურათი 2. პულსის გენერაცია

სურათი 3. მოდულატორის მაქსიმალური სიმძლავრე
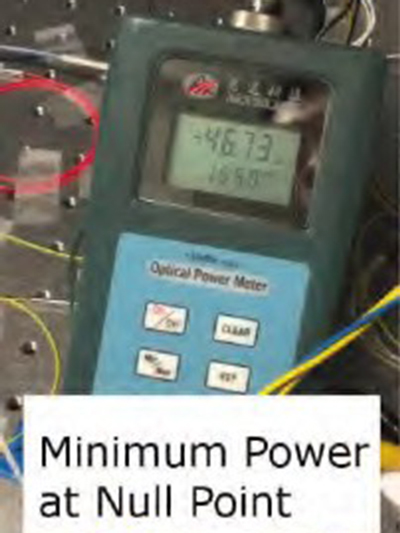
სურათი 4. მოდულატორის მინიმალური სიმძლავრე
მაქსიმალური DC ჩაქრობის კოეფიციენტი
ამ ექსპერიმენტში სისტემაზე რადიოსიხშირული სიგნალები არ იყო გამოყენებული. გაიზომა სუფთა დენის გადაშენება.
1. სურათი 5 ასახავს მოდულატორის გამომავალი სიგნალის ოპტიკურ სიმძლავრეს, როდესაც მოდულატორი კონტროლდება პიკურ წერტილში. დიაგრამაზე ნაჩვენებია 3.71 დბმ.
2. სურათი 6 გვიჩვენებს მოდულატორის გამოსავლის ოპტიკურ სიმძლავრეს, როდესაც მოდულატორი კონტროლდება ნულოვან წერტილში. დიაგრამაზე ნაჩვენებია -46.73 დბმ. რეალურ ექსპერიმენტში, მნიშვნელობა მერყეობს -47 დბმ-ის გარშემო; და -46.73 არის სტაბილური მნიშვნელობა.
3. ამრიგად, გაზომილი სტაბილური DC ჩაქრობის კოეფიციენტია 50.4 დბ.
მაღალი ჩაქრობის კოეფიციენტის მოთხოვნები
1. სისტემის მოდულატორს უნდა ჰქონდეს მაღალი ჩაქრობის კოეფიციენტი. სისტემის მოდულატორის მახასიათებელი განსაზღვრავს მაქსიმალური ჩაქრობის კოეფიციენტის მიღწევას.
2. მოდულატორის შემავალი სინათლის პოლარიზაცია უნდა იყოს უზრუნველყოფილი. მოდულატორები მგრძნობიარეა პოლარიზაციის მიმართ. სათანადო პოლარიზაციამ შეიძლება გააუმჯობესოს ჩაქრობის კოეფიციენტი 10 დბ-ზე მეტით. ლაბორატორიულ ექსპერიმენტებში, როგორც წესი, საჭიროა პოლარიზაციის კონტროლერი.
3. სათანადო გადახრის კონტროლერები. ჩვენი DC ჩაქრობის კოეფიციენტის ექსპერიმენტში მიღწეული იქნა 50.4dB ჩაქრობის კოეფიციენტი. მოდულატორის მწარმოებლის მონაცემთა ცხრილში მხოლოდ 40dB არის მითითებული. ამ გაუმჯობესების მიზეზი ის არის, რომ ზოგიერთი მოდულატორი ძალიან სწრაფად დრიფტდება. Rofea R-BC-ANY გადახრის კონტროლერები აახლებენ გადახრის ძაბვას ყოველ 1 წამში, რათა უზრუნველყონ სწრაფი რეაგირება.
სპეციფიკაციები
| პარამეტრი | მინ | ტიპი | მაქს | ერთეული | პირობები |
| კონტროლის შესრულება | |||||
| გადაშენების კოეფიციენტი | მერ 1 | 50 | dB | ||
| CSO2 | −55 | −65 | −70 | dbc | რხევის ამპლიტუდა: 2%Vπ |
| სტაბილიზაციის დრო | 4 | s | თვალთვალის წერტილები: ნული და პიკი | ||
| 10 | თვალთვალის წერტილები: Q+ და Q- | ||||
| ელექტრო | |||||
| დადებითი ძაბვა | +14.5 | +15 | +15.5 | V | |
| დადებითი დენის დენი | 20 | 30 | mA | ||
| უარყოფითი ძაბვა | -15.5 | -15 | -14.5 | V | |
| უარყოფითი დენის დენი | 2 | 4 | mA | ||
| გამომავალი ძაბვის დიაპაზონი | -9.57 | +9.85 | V | ||
| გამომავალი ძაბვის სიზუსტე | 346 | µV | |||
| ცვალებადობის სიხშირე | 999.95 | 1000 | 1000.05 | Hz | ვერსია: 1kHz დახრის სიგნალი |
| რხევის ამპლიტუდა | 0.1%Vπ | V | თვალთვალის წერტილები: ნული და პიკი | ||
| 2%Vπ | თვალთვალის წერტილები: Q+ და Q- | ||||
| ოპტიკური | |||||
| შეყვანის ოპტიკური სიმძლავრე 3 | -30 | -5 | დბმ | ||
| შეყვანის ტალღის სიგრძე | 780 | 2000 წელი | nm | ||
1. MER ეხება მოდულატორის ჩაქრობის კოეფიციენტს. მიღწეული ჩაქრობის კოეფიციენტი, როგორც წესი, მოდულატორის მონაცემთა ცხრილში მითითებული ჩაქრობის კოეფიციენტია.
2. CSO ეხება მეორე რიგის კომპოზიტურ სიგნალს. CSO-ს სწორად გასაზომად, უზრუნველყოფილი უნდა იყოს რადიოსიხშირული სიგნალის, მოდულატორებისა და მიმღებების წრფივი ხარისხი. გარდა ამისა, სისტემის CSO-ს ჩვენებები შეიძლება განსხვავდებოდეს სხვადასხვა რადიოსიხშირეზე მუშაობისას.
3. გთხოვთ გაითვალისწინოთ, რომ შემავალი ოპტიკური სიმძლავრე არ შეესაბამება ოპტიკურ სიმძლავრეს არჩეულ გადახრის წერტილში. ეს ეხება მაქსიმალურ ოპტიკურ სიმძლავრეს, რომლის ექსპორტიც მოდულატორს შეუძლია კონტროლერზე, როდესაც გადახრის ძაბვა მერყეობს -Vπ-დან +Vπ-მდე.
მომხმარებლის ინტერფეისი
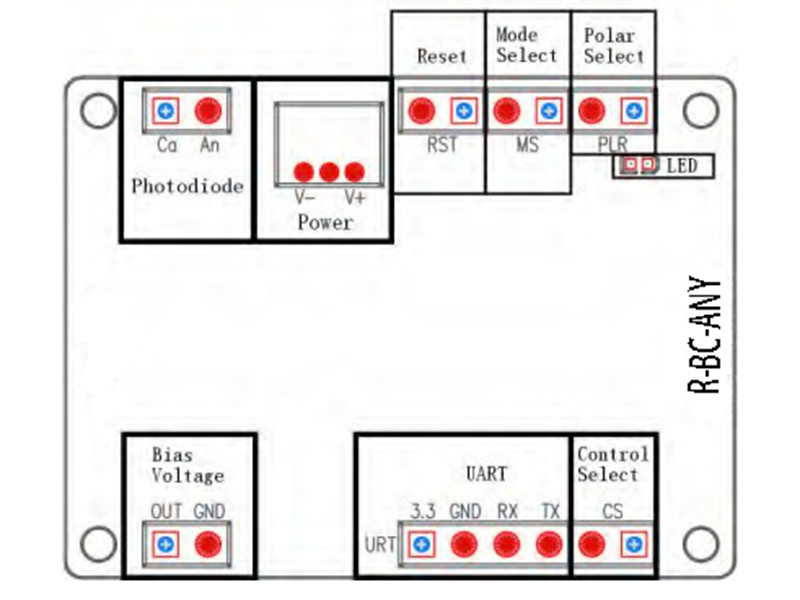
სურათი 5. აწყობა
| ჯგუფი | ოპერაცია | განმარტება |
| ფოტოდიოდი 1 | PD: MZM ფოტოდიოდის კათოდის შეერთება | ფოტოდენის შესახებ უკუკავშირის მიწოდება |
| GND: MZM ფოტოდიოდის ანოდის შეერთება | ||
| სიმძლავრე | ელექტრომომარაგება გადახრის კონტროლერისთვის | V-: აკავშირებს უარყოფით ელექტროდს |
| V+: აკავშირებს დადებით ელექტროდს | ||
| შუა ზონდი: აკავშირებს დამიწების ელექტროდს | ||
| გადატვირთვა | ჩადეთ ჯუმპერი და გამოწიეთ 1 წამის შემდეგ | კონტროლერის გადატვირთვა |
| რეჟიმის არჩევა | ჩადეთ ან გამოწიეთ ჯუმპერი | ჯუმპერის გარეშე: ნულოვანი რეჟიმი; ჯუმპერით: ოთხმაგი რეჟიმი |
| პოლარული შერჩევა 2 | ჩადეთ ან გამოწიეთ ჯუმპერი | ჯუმპერის გარეშე: დადებითი პოლარული; ჯუმპერით: უარყოფითი პოლარული |
| გადახრის ძაბვა | შეაერთეთ MZM-ის მიკერძოების ძაბვის პორტთან | OUT და GND უზრუნველყოფენ მოდულატორის ძაბვებს. |
| LED | მუდმივად ჩართულია | სტაბილურ მდგომარეობაში მუშაობა |
| ჩართვა-გამორთვა ან გამორთვა-ჩართვა ყოველ 0.2 წამში | მონაცემების დამუშავება და საკონტროლო წერტილის ძიება | |
| ჩართვა-გამორთვა ან გამორთვა-ჩართვა ყოველ 1 წამში | შეყვანის ოპტიკური სიმძლავრე ძალიან სუსტია | |
| ჩართვა-გამორთვა ან გამორთვა-ჩართვა ყოველ 3 წამში | შეყვანის ოპტიკური სიმძლავრე ძალიან ძლიერია | |
| UART | კონტროლერის მართვა UART-ის საშუალებით | 3.3: 3.3 ვ საცნობარო ძაბვა |
| GND: დამიწება | ||
| RX: კონტროლერის მიღება | ||
| TX: კონტროლერის გადაცემა | ||
| კონტროლის არჩევა | ჩადეთ ან გამოწიეთ ჯუმპერი | ჯუმპერის გარეშე: ჯუმპერის კონტროლი; ჯუმპერით: UART კონტროლი |
1. ზოგიერთ MZ მოდულატორს აქვს შიდა ფოტოდიოდები. კონტროლერის დაყენება უნდა შეირჩეს კონტროლერის ფოტოდიოდის ან მოდულატორის შიდა ფოტოდიოდის გამოყენებას შორის. ლაბორატორიული ექსპერიმენტებისთვის რეკომენდებულია კონტროლერის ფოტოდიოდის გამოყენება ორი მიზეზის გამო. პირველი, კონტროლერის ფოტოდიოდმა უზრუნველყო ხარისხი. მეორე, შემავალი სინათლის ინტენსივობის რეგულირება უფრო ადვილია. შენიშვნა: თუ იყენებთ მოდულატორის შიდა ფოტოდიოდს, გთხოვთ, დარწმუნდეთ, რომ ფოტოდიოდის გამომავალი დენი მკაცრად პროპორციულია შემავალი სიმძლავრის.
2. პოლარული პინი გამოიყენება საკონტროლო წერტილის გადასართავად Peak-სა და Null-ს შორის Null კონტროლის რეჟიმში (განსაზღვრულია Mode Select პინით) ან Quad+-ში.
და Quad- Quad კონტროლის რეჟიმში. თუ პოლარული პინის ჯამპერი არ არის ჩასმული, საკონტროლო წერტილი იქნება Null რეჟიმში ან Quad+ Quad რეჟიმში. RF სისტემის ამპლიტუდა ასევე იმოქმედებს საკონტროლო წერტილზე. როდესაც RF სიგნალი არ არის ან RF სიგნალის ამპლიტუდა მცირეა, კონტროლერს შეუძლია სამუშაო წერტილის სწორ წერტილზე დაბლოკვა MS-ისა და PLR ჯამპერის მიერ არჩეული წესით. როდესაც RF სიგნალის ამპლიტუდა აღემატება გარკვეულ ზღვარს, სისტემის პოლარობა შეიცვლება, ამ შემთხვევაში, PLR სათაური საპირისპირო მდგომარეობაში უნდა იყოს, ანუ ჯამპერი უნდა ჩასვათ, თუ ის არ არის ჩასმული, ან ამოიღოთ, თუ ის ჩასმულია.
ტიპიური გამოყენება
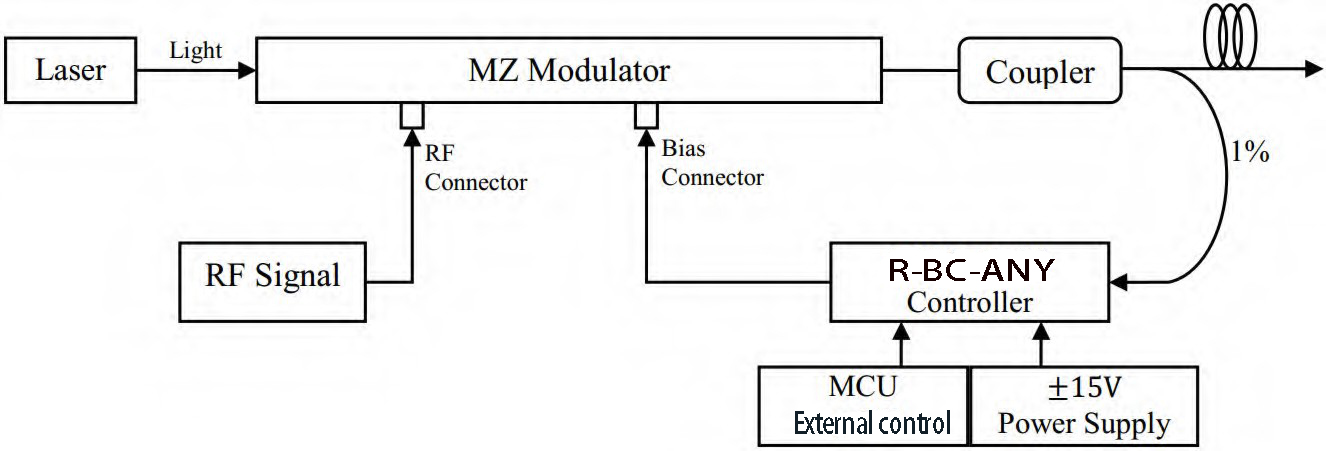
კონტროლერი მარტივი გამოსაყენებელია.
ნაბიჯი 1. შეაერთეთ შემაერთებლის 1%-იანი პორტი კონტროლერის ფოტოდიოდთან.
ნაბიჯი 2. კონტროლერის გამომავალი გადახრის ძაბვა (SMA-ს ან 2.54 მმ 2-პინიანი კონექტორის მეშვეობით) შეაერთეთ მოდულატორის გადახრის პორტთან.
ნაბიჯი 3. მიაწოდეთ კონტროლერს +15V და -15V მუდმივი ძაბვა.
ნაბიჯი 4. გადატვირთეთ კონტროლერი და ის დაიწყებს მუშაობას.
შენიშვნა. კონტროლერის გადატვირთვამდე დარწმუნდით, რომ მთელი სისტემის რადიოსიხშირული სიგნალი ჩართულია.
Rofea Optoelectronics გთავაზობთ კომერციული ელექტროოპტიკური მოდულატორების, ფაზური მოდულატორების, ინტენსივობის მოდულატორების, ფოტოდეტექტორების, ლაზერული სინათლის წყაროების, DFB ლაზერების, ოპტიკური გამაძლიერებლების, EDFA, SLD ლაზერის, QPSK მოდულაციის, პულსური ლაზერის, სინათლის დეტექტორის, დაბალანსებული ფოტოდეტექტორის, ლაზერული დრაივერის, ბოჭკოვანი ოპტიკური გამაძლიერებლის, ოპტიკური სიმძლავრის მრიცხველის, ფართოზოლოვანი ლაზერის, რეგულირებადი ლაზერის, ოპტიკური დეტექტორის, ლაზერული დიოდური დრაივერის, ბოჭკოვანი გამაძლიერებლის პროდუქციის ხაზს. ჩვენ ასევე გთავაზობთ მრავალ კონკრეტულ მოდულატორს პერსონალიზაციისთვის, როგორიცაა 1*4 მასივის ფაზური მოდულატორები, ულტრა დაბალი Vpi და ულტრა მაღალი ჩაქრობის კოეფიციენტის მოდულატორები, რომლებიც ძირითადად გამოიყენება უნივერსიტეტებსა და ინსტიტუტებში.
ვიმედოვნებთ, რომ ჩვენი პროდუქტები თქვენთვის და თქვენი კვლევისთვის სასარგებლო იქნება.


