




ულტრაკომპაქტური IQ მოდულატორი, მიკერძოების კონტროლერი, ავტომატური მიკერძოების კონტროლერი


ფუნქცია
• IQ მოდულატორებისთვის სამ მიკერძოებას იძლევა მოდულაციის ფორმატიდან დამოუკიდებელი:
• QPSK, QAM, OFDM, SSB დამოწმებული
• ჩართეთ და ითამაშეთ:
ხელით კალიბრაცია არ არის საჭირო, ყველაფერი ავტომატურია
• I, Q მკლავები: კონტროლი Peak და Null რეჟიმებზე. მაღალი ჩაქრობის კოეფიციენტი: მაქს. 50dB1
• P arm: კონტროლი Q+ და Q- რეჟიმებზე. სიზუსტე: ± 2◦
• დაბალი პროფილი: 40 მმ (სიგანე) × 28 მმ (სიღრმე) × 8 მმ (სიმაღლე)
• მაღალი სტაბილურობა: სრულად ციფრული განხორციელება მარტივი გამოსაყენებელია:
• ხელით მართვა მინი ჯამპერით; მოქნილი OEM ოპერაციები UART2-ის საშუალებით
• ორი რეჟიმი გადახრის ძაბვის უზრუნველსაყოფად: ა. ავტომატური გადახრის კონტროლი ბ. მომხმარებლის მიერ განსაზღვრული გადახრის ძაბვა
აპლიკაცია
• LiNbO3 და სხვა IQ მოდულატორები
• QPSK, QAM, OFDM, SSB და ა.შ.
• თანმიმდევრული გადაცემა
შესრულება
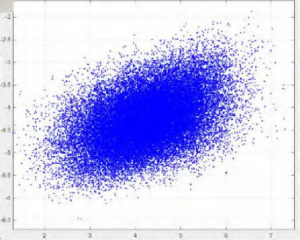
სურათი 1. თანავარსკვლავედი (კონტროლერის გარეშე)
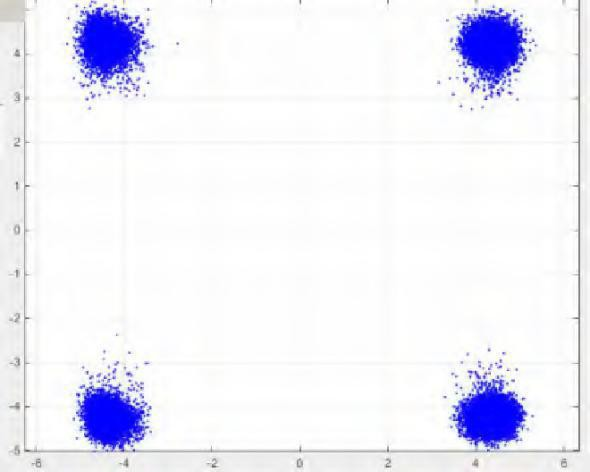
სურათი 2. QPSK Constellation (კონტროლერით)
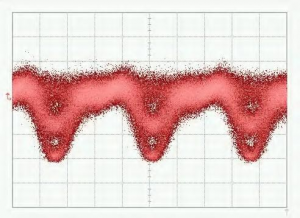
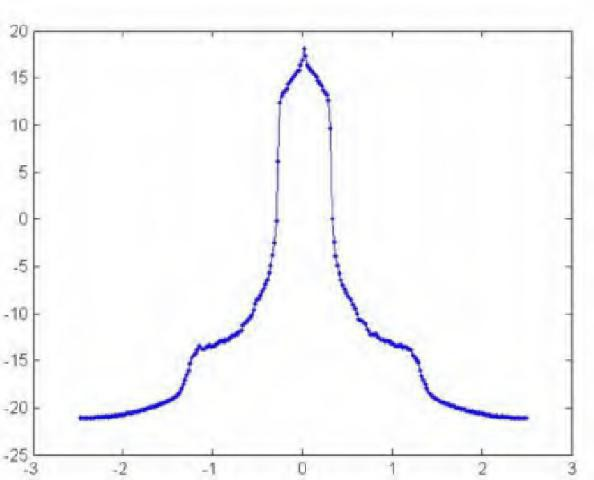
სურათი 3. QPSK-თვალის ნიმუში
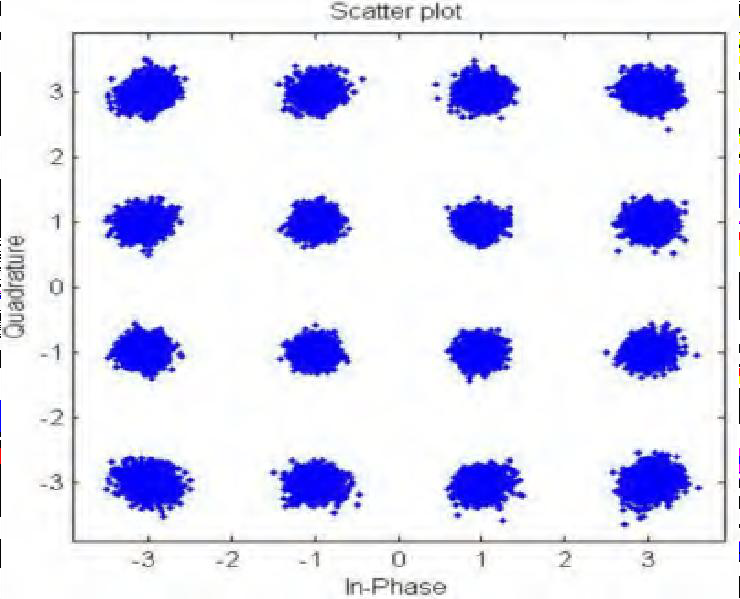
სურათი 5. 16-QAM თანავარსკვლავედის ნიმუში
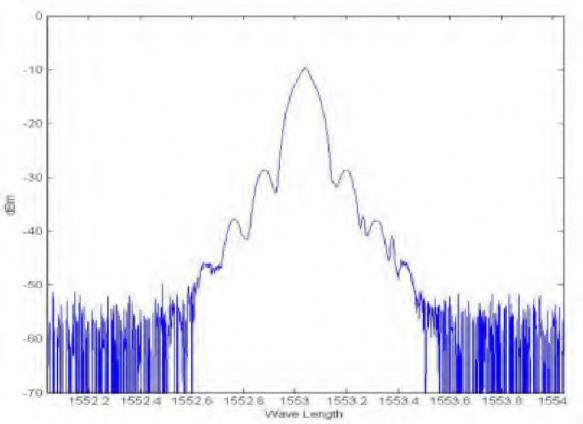
სურათი 4. QPSK სპექტრი
სურათი 6. 16-QAM სპექტრი
სპეციფიკაციები
| პარამეტრი | მინ | ტიპი | მაქს | ერთეული |
| კონტროლის შესრულება | ||||
| I, Q მკლავები კონტროლდებანული (მინიმალური) ანპიკი (მაქსიმუმი) წერტილი | ||||
| გადაშენების კოეფიციენტი | მერ1 | 50 | dB | |
| P მკლავი კონტროლდებაQ+(მარჯვნივ კვადრატურა) ანQ-( მარცხნივ კვადრატურა) წერტილი | ||||
| სიზუსტე ოთხკუთხედზე | −2 | +2 | ხარისხი2 | |
| სტაბილიზაციის დრო | 15 | 20 | 25 | s |
| ელექტრო | ||||
| დადებითი ძაბვა | +14.5 | +15 | +15.5 | V |
| დადებითი დენის დენი | 20 | 30 | mA | |
| უარყოფითი ძაბვა | -15.5 | -15 | -14.5 | V |
| უარყოფითი დენის დენი | 8 | 15 | mA | |
| გამომავალი ძაბვის დიაპაზონი | -14.5 | +14.5 | V | |
| რხევის ამპლიტუდა | 1%Vπ | V | ||
| ოპტიკური | ||||
| შეყვანის ოპტიკური სიმძლავრე3 | -30 | -8 | დბმ | |
| შეყვანის ტალღის სიგრძე | 1100 | 1650 წელი | nm | |
1. MER ეხება მოდულატორის ჩაქრობის კოეფიციენტს. მიღწეული ჩაქრობის კოეფიციენტი, როგორც წესი, მოდულატორის მონაცემთა ცხრილში მითითებული ჩაქრობის კოეფიციენტია.
2. გთხოვთ გაითვალისწინოთ, რომ შემავალი ოპტიკური სიმძლავრე არ შეესაბამება ოპტიკურ სიმძლავრეს არჩეულ გადახრის წერტილში. ეს ეხება მაქსიმალურ ოპტიკურ სიმძლავრეს, რომლის ექსპორტიც მოდულატორს შეუძლია კონტროლერზე, როდესაც გადახრის ძაბვა მერყეობს -Vπ-დან +Vπ-მდე.
მომხმარებლის ინტერფეისი
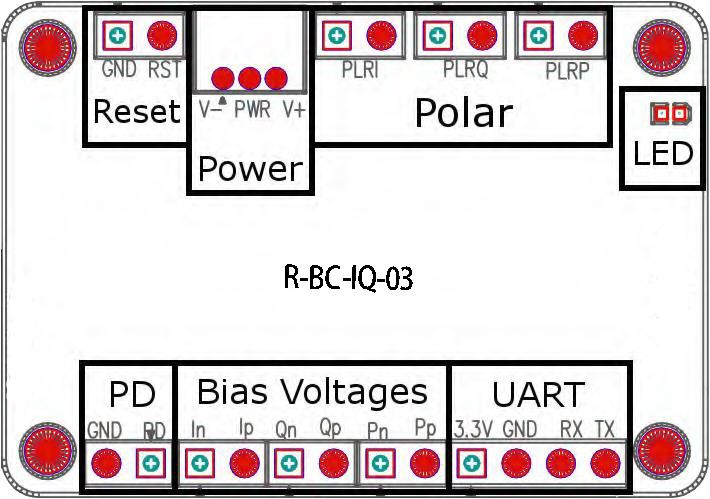
სურათი 5. აწყობა
| ჯგუფი | ოპერაცია | განმარტება |
| გადატვირთვა | ჩადეთ ჯუმპერი და გამოწიეთ 1 წამის შემდეგ | კონტროლერის გადატვირთვა |
| სიმძლავრე | ელექტრომომარაგება გადახრის კონტროლერისთვის | V- აკავშირებს კვების წყაროს უარყოფით ელექტროდს |
| V+ აკავშირებს კვების წყაროს დადებით ელექტროდს | ||
| შუა პორტი უკავშირდება დამიწების ელექტროდს | ||
| პოლარული1 | PLRI: ჩადეთ ან გამოწიეთ ჯუმპერი | ჯუმპერის გარეშე: ნულოვანი რეჟიმი; ჯუმპერით: პიკური რეჟიმი |
| PLRQ: ჩადეთ ან გამოწიეთ ჯუმპერი | ჯუმპერის გარეშე: ნულოვანი რეჟიმი; ჯუმპერით: პიკური რეჟიმი | |
| PLRP: ჩადეთ ან გამოწიეთ ჯუმპერი | ჯამპერის გარეშე: Q+ რეჟიმი; ჯამპერით: Q- რეჟიმი | |
| LED | მუდმივად ჩართული | სტაბილურ მდგომარეობაში მუშაობა |
| ჩართვა-გამორთვა ან გამორთვა-ჩართვა ყოველ 0.2 წამში | მონაცემების დამუშავება და საკონტროლო წერტილის ძიება | |
| ჩართვა-გამორთვა ან გამორთვა-ჩართვა ყოველ 1 წამში | შეყვანის ოპტიკური სიმძლავრე ძალიან სუსტია | |
| ჩართვა-გამორთვა ან გამორთვა-ჩართვა ყოველ 3 წამში | შეყვანის ოპტიკური სიმძლავრე ძალიან ძლიერია | |
| PD2 | შეაერთეთ ფოტოდიოდთან | PD პორტი აკავშირებს ფოტოდიოდის კათოდს |
| GND პორტი აკავშირებს ფოტოდიოდის ანოდს | ||
| გადახრის ძაბვები | In, Ip: I მკლავის გადახრის ძაბვა | Ip: დადებითი მხარე; In: უარყოფითი მხარე ან მიწა |
| Qn, Qp: Q მკლავის გადახრის ძაბვა | Qp: დადებითი მხარე; Qn: უარყოფითი მხარე ან დამიწება | |
| Pn, Pp: P მკლავის გადახრის ძაბვა | Pp: დადებითი მხარე; Pn: უარყოფითი მხარე ან დამიწება | |
| UART | კონტროლერის მართვა UART-ის საშუალებით | 3.3: 3.3 ვ საცნობარო ძაბვა |
| GND: დამიწება | ||
| RX: კონტროლერის მიღება | ||
| TX: კონტროლერის გადაცემა |
1 პოლარობა დამოკიდებულია სისტემის რადიოსიხშირული სიგნალზე. როდესაც სისტემაში რადიოსიხშირული სიგნალი არ არის, პოლარობა დადებითი უნდა იყოს. როდესაც რადიოსიხშირული სიგნალის ამპლიტუდა გარკვეულ დონეზე მეტია, პოლარობა დადებითიდან უარყოფითზე შეიცვლება. ამ დროს, ნულოვანი და პიკური წერტილები ერთმანეთს ენაცვლებიან. Q+ და Q- წერტილებიც ენაცვლებიან ერთმანეთს. პოლარული გადამრთველი მომხმარებელს საშუალებას აძლევს შეცვალოს პოლარობა.
პირდაპირ, ოპერაციული წერტილების შეცვლის გარეშე.
2მხოლოდ ერთი არჩევანი უნდა გაკეთდეს კონტროლერის ფოტოდიოდის ან მოდულატორის ფოტოდიოდის გამოყენებას შორის. ლაბორატორიული ექსპერიმენტებისთვის კონტროლერის ფოტოდიოდის გამოყენება რეკომენდებულია ორი მიზეზის გამო. პირველი, კონტროლერის ფოტოდიოდს აქვს გარანტირებული თვისებები. მეორე, შემავალი სინათლის ინტენსივობის რეგულირება უფრო ადვილია. მოდულატორის შიდა ფოტოდიოდის გამოყენების შემთხვევაში, დარწმუნდით, რომ ფოტოდიოდის გამომავალი დენი მკაცრად პროპორციულია შემავალი სიმძლავრის.
Rofea Optoelectronics გთავაზობთ კომერციული ელექტროოპტიკური მოდულატორების, ფაზური მოდულატორების, ინტენსივობის მოდულატორების, ფოტოდეტექტორების, ლაზერული სინათლის წყაროების, DFB ლაზერების, ოპტიკური გამაძლიერებლების, EDFA, SLD ლაზერის, QPSK მოდულაციის, პულსური ლაზერის, სინათლის დეტექტორის, დაბალანსებული ფოტოდეტექტორის, ლაზერული დრაივერის, ბოჭკოვანი ოპტიკური გამაძლიერებლის, ოპტიკური სიმძლავრის მრიცხველის, ფართოზოლოვანი ლაზერის, რეგულირებადი ლაზერის, ოპტიკური დეტექტორის, ლაზერული დიოდური დრაივერის, ბოჭკოვანი გამაძლიერებლის პროდუქციის ხაზს. ჩვენ ასევე გთავაზობთ მრავალ კონკრეტულ მოდულატორს პერსონალიზაციისთვის, როგორიცაა 1*4 მასივის ფაზური მოდულატორები, ულტრა დაბალი Vpi და ულტრა მაღალი ჩაქრობის კოეფიციენტის მოდულატორები, რომლებიც ძირითადად გამოიყენება უნივერსიტეტებსა და ინსტიტუტებში.
ვიმედოვნებთ, რომ ჩვენი პროდუქტები თქვენთვის და თქვენი კვლევისთვის სასარგებლო იქნება.


