




დიზაინიფოტონურიინტეგრირებული სქემა
ფოტონური ინტეგრირებული სქემები(PIC) ხშირად იქმნება მათემატიკური სკრიპტების დახმარებით, ინტერფერომეტრებში ან სხვა აპლიკაციებში, რომლებიც მგრძნობიარეა გზის სიგრძის მიმართ, გზის სიგრძის მნიშვნელობის გამო.სურათიმზადდება ვაფლზე მრავალი ფენის (როგორც წესი, 10-დან 30-მდე) დატანით, რომლებიც შედგება მრავალი პოლიგონალური ფორმისგან, რომლებიც ხშირად წარმოდგენილია GDSII ფორმატში. ფაილის ფოტონიღბის მწარმოებელთან გაგზავნამდე, ძალიან სასურველია PIC-ის სიმულირება დიზაინის სისწორის დასადასტურებლად. სიმულაცია დაყოფილია რამდენიმე დონედ: ყველაზე დაბალი დონეა სამგანზომილებიანი ელექტრომაგნიტური (EM) სიმულაცია, სადაც სიმულაცია ხორციელდება ტალღის სიგრძის ქვე დონეზე, თუმცა მასალაში ატომებს შორის ურთიერთქმედება დამუშავებულია მაკროსკოპული მასშტაბით. ტიპიური მეთოდები მოიცავს სამგანზომილებიან სასრული სხვაობის დროის დომენს (3D FDTD) და საკუთარი რეჟიმის გაფართოებას (EME). ეს მეთოდები ყველაზე ზუსტია, მაგრამ არაპრაქტიკულია PIC სიმულაციის მთელი დროის განმავლობაში. შემდეგი დონეა 2.5-განზომილებიანი EM სიმულაცია, როგორიცაა სასრული სხვაობის სხივის გავრცელება (FD-BPM). ეს მეთოდები გაცილებით სწრაფია, მაგრამ გარკვეულ სიზუსტეს სწირავს და მხოლოდ პარაქსიალური გავრცელების დამუშავება შეუძლია და არ შეიძლება გამოყენებულ იქნას რეზონატორების სიმულაციისთვის, მაგალითად. შემდეგი დონეა 2D ელექტრომაგნიტური სიმულაცია, როგორიცაა 2D FDTD და 2D BPM. ესენიც უფრო სწრაფია, მაგრამ შეზღუდული ფუნქციონალურობით, მაგალითად, მათ არ შეუძლიათ პოლარიზაციის როტატორების სიმულაცია. შემდეგი დონეა გადაცემის და/ან გაფანტვის მატრიცის სიმულაცია. თითოეული ძირითადი კომპონენტი დაყვანილია შემავალი და გამომავალი კომპონენტებით, ხოლო დაკავშირებული ტალღმძღოლი დაყვანილია ფაზური ცვლისა და შესუსტების ელემენტად. ეს სიმულაციები უკიდურესად სწრაფია. გამომავალი სიგნალი მიიღება გადაცემის მატრიცის შემავალი სიგნალით გამრავლებით. გაფანტვის მატრიცა (რომლის ელემენტებსაც S-პარამეტრები ეწოდება) ამრავლებს შემავალ და გამომავალ სიგნალებს ერთ მხარეს, რათა იპოვოს შემავალი და გამომავალი სიგნალები კომპონენტის მეორე მხარეს. ძირითადად, გაფანტვის მატრიცა შეიცავს ელემენტის შიგნით არეკვლას. გაფანტვის მატრიცა, როგორც წესი, ორჯერ აღემატება გადაცემის მატრიცას თითოეულ განზომილებაში. შეჯამებისთვის, 3D ელექტრომაგნიტურიდან გადაცემა/გაფანტვის მატრიცის სიმულაციამდე, სიმულაციის თითოეული ფენა წარმოადგენს კომპრომისს სიჩქარესა და სიზუსტეს შორის და დიზაინერები ირჩევენ სიმულაციის სწორ დონეს მათი კონკრეტული საჭიროებებისთვის, რათა ოპტიმიზაცია გაუკეთონ დიზაინის ვალიდაციის პროცესს.
თუმცა, გარკვეული ელემენტების ელექტრომაგნიტურ სიმულაციაზე დაყრდნობა და მთელი PIC-ის სიმულირებისთვის გაფანტვის/გადაცემის მატრიცის გამოყენება არ იძლევა გარანტიას ნაკადის ფირფიტის წინ სრულიად სწორ დიზაინზე. მაგალითად, არასწორად გათვლილი ბილიკის სიგრძეები, მრავალმოდური ტალღის გამტარები, რომლებიც ვერ ახშობენ მაღალი რიგის რეჟიმებს ეფექტურად, ან ორი ტალღის გამტარი, რომლებიც ერთმანეთთან ძალიან ახლოსაა, რაც იწვევს მოულოდნელ შეერთების პრობლემებს, სავარაუდოდ, სიმულაციის დროს შეუმჩნეველი დარჩება. ამიტომ, მიუხედავად იმისა, რომ მოწინავე სიმულაციის ინსტრუმენტები უზრუნველყოფენ დიზაინის ვალიდაციის ძლიერ შესაძლებლობებს, ის მაინც მოითხოვს დიზაინერის მხრიდან მაღალი ხარისხის სიფხიზლეს და ფრთხილად შემოწმებას, პრაქტიკულ გამოცდილებასთან და ტექნიკურ ცოდნასთან ერთად, დიზაინის სიზუსტისა და სანდოობის უზრუნველსაყოფად და ნაკადის სქემის რისკის შესამცირებლად.
ტექნიკა, რომელსაც მეჩხერი FDTD ეწოდება, საშუალებას იძლევა, რომ 3D და 2D FDTD სიმულაციები პირდაპირ შესრულდეს სრულ PIC დიზაინზე, დიზაინის დასადასტურებლად. მიუხედავად იმისა, რომ ნებისმიერი ელექტრომაგნიტური სიმულაციის ინსტრუმენტისთვის რთულია ძალიან დიდი მასშტაბის PIC-ის სიმულირება, მეჩხერ FDTD-ს შეუძლია საკმაოდ დიდი ლოკალური არეალის სიმულირება. ტრადიციულ 3D FDTD-ში სიმულაცია იწყება ელექტრომაგნიტური ველის ექვსი კომპონენტის ინიციალიზაციით კონკრეტულ კვანტიზებულ მოცულობაში. დროთა განმავლობაში, მოცულობაში ახალი ველის კომპონენტი გამოითვლება და ა.შ. თითოეული ნაბიჯი მოითხოვს უამრავ გამოთვლას, ამიტომ დიდ დროს მოითხოვს. მეჩხერ 3D FDTD-ში, მოცულობის თითოეულ წერტილში თითოეულ ეტაპზე გამოთვლის ნაცვლად, შენარჩუნებულია ველის კომპონენტების სია, რომელიც თეორიულად შეიძლება შეესაბამებოდეს თვითნებურად დიდ მოცულობას და გამოითვალოს მხოლოდ ამ კომპონენტებისთვის. თითოეულ დროის ეტაპზე ემატება ველის კომპონენტების მიმდებარე წერტილები, ხოლო გარკვეული სიმძლავრის ზღურბლის ქვემოთ ველის კომპონენტები ამოღებულია. ზოგიერთი სტრუქტურისთვის, ეს გამოთვლა შეიძლება რამდენიმე რიგით უფრო სწრაფი იყოს, ვიდრე ტრადიციული 3D FDTD. თუმცა, იშვიათი FDTDS კარგად არ მუშაობს დისპერსიულ სტრუქტურებთან მუშაობისას, რადგან ეს დროის ველი ძალიან ფართოვდება, რაც იწვევს სიების ძალიან გრძელ და მართვად სიებს. სურათი 1 გვიჩვენებს პოლარიზაციის სხივის გამყოფის (PBS) მსგავსი 3D FDTD სიმულაციის ეკრანის ანაბეჭდის მაგალითს.
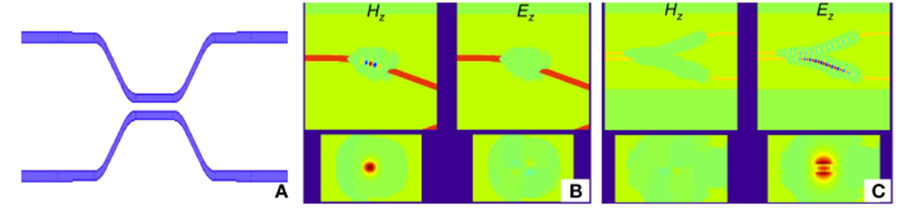
სურათი 1: 3D იშვიათი FDTD-ის სიმულაციის შედეგები. (A) სიმულირებული სტრუქტურის ზემოდან ხედია, რომელიც მიმართულების შემაერთებელია. (B) გვიჩვენებს კვაზი-TE აგზნების გამოყენებით სიმულაციის სკრინშოტს. ზემოთ მოცემულ ორ დიაგრამაზე ნაჩვენებია კვაზი-TE და კვაზი-TM სიგნალების ზემოდან ხედი, ხოლო ქვემოთ მოცემულ ორ დიაგრამაზე ნაჩვენებია შესაბამისი განივი ჭრილის ხედვა. (C) გვიჩვენებს კვაზი-TM აგზნების გამოყენებით სიმულაციის სკრინშოტს.
გამოქვეყნების დრო: 23 ივლისი-2024